



���՟ᾀ
4009991130
ȫ���yһ���՟ᾀ
4009991130
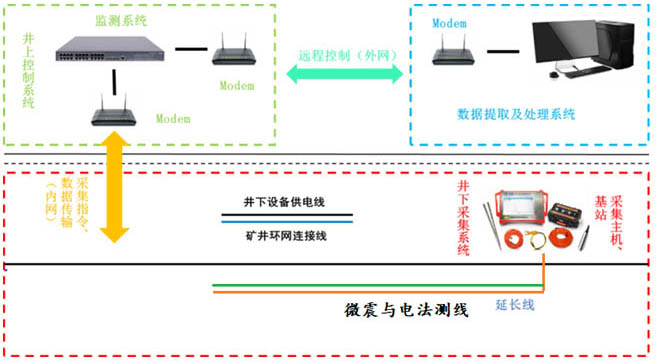
��O�y���g�����Îr�w����׃�κ��Ɖĺ����l��������M�бO�y���̎r�w�����Եļ��g��������λ�O�y���g����ͨ�^�^�y���������a��������a����С�����¼����O�y���a��ӵ�Ӱ푡�Ч������� �B�ĵ����������g�����Ђ���������O�yϵ�y���P�I�������c�r�wֱ�ӽ��|�����ڸ�֪�r�w�Ȱl��׃������Ϣ���x���m���Ĝy�cλ�Á����b��������ʹ�����������ý��ձO�y�l���ڎr�w�ȵ��𣬂������nj��F������̖�IJɼ��������ɼ���������̖�D�������̖���b�á���O�yϵ�y��Ӳ����������z���������ɼ���վ���O�乩�ϵ�y��������ݔϵ�y���ֽM�ɡ���z����ؓ؟�ɼ����|��������̖�����ɼ��x�����|���IJ�����̖ͨ�^A/D�D�Q�锵����̖�����ϵ�y���C����ϵ�y����늣�ϵ�y�Ĕ����ɔ�����ݔϵ�yؓ؟��ݔ��
늷��O�yϵ�y�ԾW�j���вɼ����g����A��ͨ�^����늈��ıO�y����ֱ�^�صõ����|�ĸ�ˮ��r���B���ٶȡ��B��͠�B�ȵ�׃����r��ˮ�ĝB������˵�늈�������ͨ�^��늈���������Ȼ��ӳ����ˮ�ĝB���^�̣��Ķ��_�����ڵװ�ˮ�����A����ԓϵ�y�������h��ͨӍ�����ܿ��Ƶ����M���g���γɸ�Ч���ɿ��ĄӑB�O�yϵ�y��ͨ�^��λPC�ϵ�ܛ���l��ָ��������ܿ��ƾ���늷��x�������F늷������h�̿��ƣ����܌��r�����@ȡ��늉�����������M�гɈD��
���c늷��h�̱O�yϵ�y�ɾ��²ɼ�ϵ�y�;��Ͽ���ϵ�y�ɲ��ֽM�ɡ����²ɼ�ϵ�y��늷��x���C��늷���վ�����վ��늘O���z��������·�����Դ���Ԓ�ӿڵȽM�ɾ���늷��ɼ�ϵ�y�����¿��Բ��ö����ɼ���վ��
����ϵ�y����ϵ�y��Ӌ��C������ܛ�����{�ƽ��{���M�ɣ��������ϵ�y�c�������²ɼ���վͨ�^�V�þW�j�l��ָ��͂��͔������x���Ѓ��Õr犣����Ԍ��F���r�_�C���P�C������ڲɼ������r��늣��܉����ܙz�yϵ�y�����r����������x���Ԅӆ��Ӳ��^�m��ɔ��ǰ�Ĺ������m����������˹��������ԭ���늵���r��
���c늷��h�̱O�yϵ�y�Ɍ��F���늷��������r�ɼ������O�y�^��ȵĎr�w���Ѽ�ˮ�ĝB����r�M�оC�ό��r�O�y�A����
���c늷��O�yϵ�yʾ��D
|
|
 |
��O�yϵ�y���������������ɼ���վ���O�乩�ϵ�y��������ݔϵ�y�M�ɡ�늷��O�yϵ�y��늘O���ɼ����C���ɼ���վ���O�乩�ϵ�y��������ݔϵ�y�M�ɡ�
����Ӳ��ϵ�y��Ҫ�x���O���YZD12-C�V�ñ�������늷����бO�y�x���ǻ��ڡ��ֲ�ʽ��������늘O�λ����̖�ɼ������� �͡�һ�N���ڵV�����W���g����̽�x���h�̿���ϵ�y������Ʒ�������9헰l���������ƶ��ɣ����ϡ�ú�V����늷������ɼ��������ȶ���ИI�˜ʡ�ԓ�O���m���ڡ�ú�V����ˮ���t���ھŗl�е����c늷���ϱO�yϵ�y����ɼ�ģ�K���õ����W���W�͵�������Wԭ����Ӌ��C�����Ӌ�㹦�܁팍�F���¼��ľ��_��λ�ͼ��e��С�Ĵ_����늷�ģ�Kʹ��ȫ늈��^�y���gͬ���ɼ����Мy�c����Ȼ늈���һ��늈��λ�Ͷ���늈��λ�������O�������늷������ɼ�Ч�ʺͲɼ����ȡ��x���鰲��ʡ����һ�w���b�䣬�ɏV�������ڵV�����졢��������ˮ��̽�y�������c늷���ϵȿƌW��Ч�ıO�y������ͻˮ�O�y�A��ϵ�y��

YZD12-C�V����늷����бO�y�x

YZD12-C�V����늷����бO�y�x���°��b��ʩ
1.�زɹ�����픡��װ帻ˮ��̽�y��
2.�زɹ�����ɿՅ^��ˮ��̽�y��
3.�زɹ���������������Ⱥ�ˮ����̽�y��
4.����װ�늜y������̽�y��
5.���M�����������ǰ̽�y��
6.�زɹ����桰���������������������^�y��
7.ˮ���A���O�y��
8.�زɹ����昋�졢ú��׃�����������Ѕ^��̽�y��
9.���M���ӭ�^ǰ�����|����l������̽�y��
10.�����c늷���ϵȱO�y��
1.�ֲ�ʽ�ɼ���վ�ɔUչ�����������g�ֲ��`���׃��
2.�Ɍ��F���漰���¶�N��늈����S�����S늷���̽����������ʷ���̽����Ȼ�λ����̽����늷���̽����늷���̽���r�g����l���ȣ��ɶ���������ɼ������F�ನ����̽��
3.���Ԍ��r�@ʾ�����늉���̖�IJ��εȣ�
4.���ü�����շ��x���pģʽ늘O��
5.һ�w�����C����ARM���W�jͨӍ���Ȳ��Դ����ӱ����Դ�ȹ���ģ�K�M�ɣ������B�ӵV�����W��
6.һ�w�����C�B��n���ɼ���վ������16n·���l��16n·���յľW�j���е�늈���̽���O�yϵ�y�����ߘ���16n·��̽ϵ�y���Ñ��ɸ������������x��x��������
7.����һ�I�ɈDģʽ���������Ӻ������ܣ�
8.�ɼ���վ���ô������惦��֧�֚vʷ�����鿴����
9.ܛ��������䣬���ü�ߔ����ɼ��c̎���Č��Iϵ�yܛ�����҇���ͬ�ИI�Ⱦ��Й����ԣ��Ɍ��F�����IJɼ����@ʾ�����������ȡ�̎�������Єe������
10.���ܻ�Androidϵ�yƽ�_�������ɫ�|�������Cе�o�����I���˙C������ݡ�

ܛ����䛽���
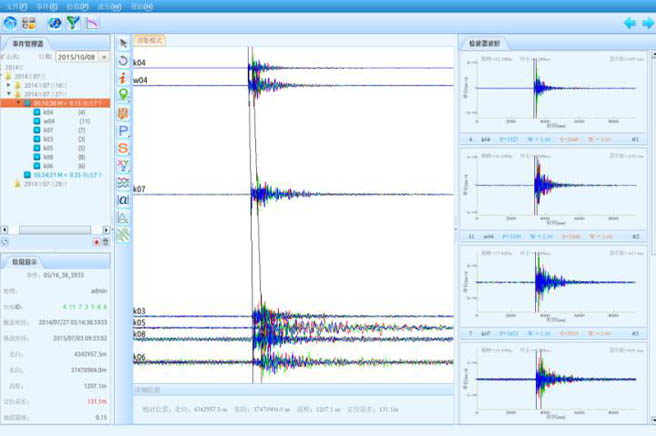
���O�y�^�����Sģ�͌��룬�c���¼��r�շֲ���Y�ϣ��γ����S���w��ҕ��ģ�ͣ�����ֱ�^�������¼��r�շֲ�Ҏ�ɡ�
ϵ�y��չʾ���r���Ρ��O�䌦�����ؓ�D�����ֲɼ��x������������Ϣ�Լ��O��������������õ����P��Ϣ���O�y���Ĕ������r���딵���졣�������r�O��ܛ���ɼ����������Ñ�����������̎��ܛ�����������S��ҕ��ܛ���քe̎����չʾ�ɼ����Č��r���������ܻ����˹���������̎������ͨ�^�������M�ОV�������M�в���׃�Q��ʰȡ��P��S��������Ȼ��λӋ��õ����¼��Ķ�λ��Ϣ����Դ��Ϣ��
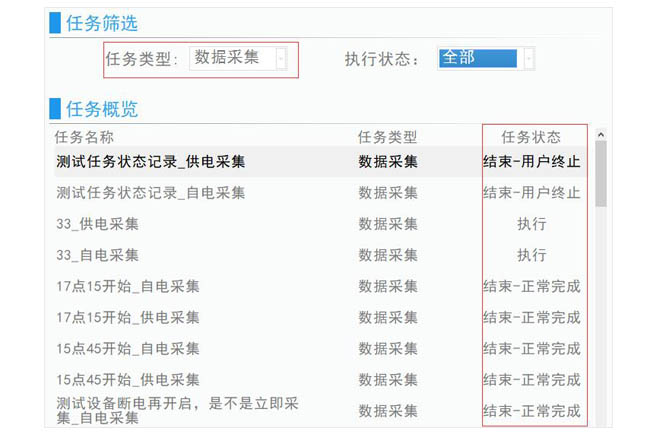
�ھ��O�yϵ�y�b����X�ˣ��Ñ���ͨ�^�Ñ������ܴa���ϵ�y�����M���O��������h�̿��ƣ������鿴������Ϣ���O���B����ǰ�������������M���h���Å�������ʼ���Y��ͨ��̖���l��늉�����늕r�g��������͡���늲ɘ��g�����ɘ��g��������b�õȡ������F�����Ļ��c�鿴̎�������r�����@ʾ��D3-11��ʾ��

ϵ�y��䛼��½��Ŀ����
���r�����ɼ��@ʾ����
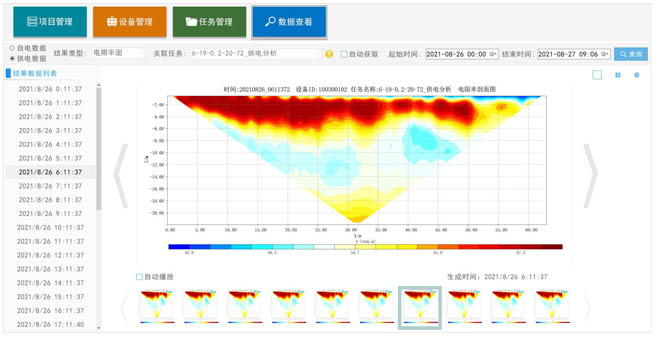
̎���Y���@ʾ����
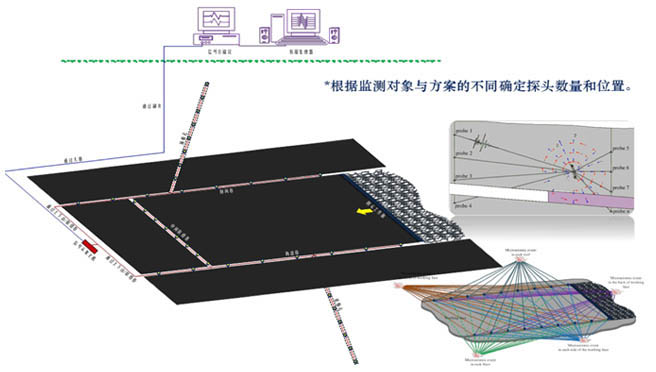
���c늷�����h�̱O�yϵ�y��ú�V�еľ��w��ʩ���ɰ��������������ľ��Mʩ�������M�в��ã������Mһ������ԓ���c늷�����h�̱O�yϵ�y��һ����������Mǰ�����������λ�ã��������λ�ò��ñO�y�@�ף����Mһ�����b�O�y���O�䣬���˜p��ϵ�y��վ�Ć��}�����m�����ӱO�y���L�ȣ����O��늘O���������g��5m����64�����t�O�y����L�Ȟ�315m���ɱ��C�����ԓ�L�ȷ����Ⱦ��M�^���еČ��r�O�y��
��������M�^�����M�Ќ��rˮ���A�������r�O�y��ͨ�^�O�y�����������̖�͵�����̖�����ӵ��܇����ѿp�����ӡ��_�������B�ʌ�ˮ�Եȅ��������þ��M�C������Դ�����M���������ǰ̽�y���ڱO�yˮ����ͬ�r���F���쳬ǰ̽�y���������ȫ���M���{�o������������M��һ���O�y�^�ε��L�Ⱥ��^�m��δ���M�����ӭ�^ǰ��ʩ���ڶ����O�y�ף��M����һվ���r�O�y���ڹ���������������γɺ��������χ��沼�õıO�y�ף����M������Դ늷�����̽�y����λ̽�y���۲�̽�y����̽̽�y����������ȵ�ˮ���������M�г����ķ�����λ���ڹ�����ز��^���У��Կ������@Щ�O�y���^�m�M�бO�y���������r�O�y������ز��^���е�ˮ�����O�y픵װ�r�w�Ɖij̶ȣ�������϶��������
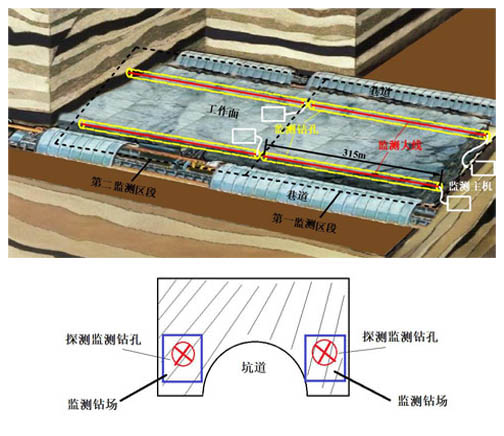
̽�y�O�yϵ�y����ƽ��ʾ��D������D
�@���OӋƽ�沼��ʾ��D���D��ʾ���@���OӋ���g����ʾ��D���D��ʾ�� 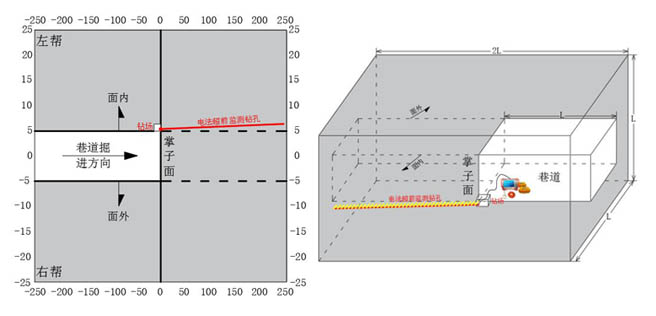
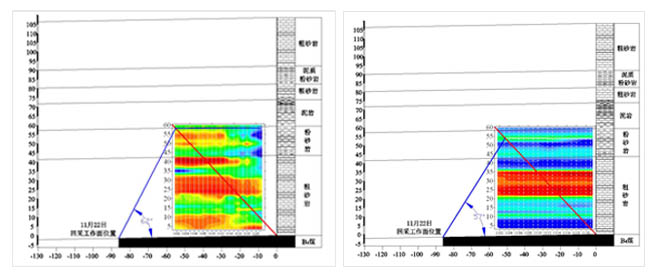
����ˮ�ĝB�������������@���ͣ����������@���ߣ���Ȼ늈���һ�Έ��λ�h����δ��ˮ���|�е��λ�����λ�Oֵλ��Ҳָʾ�B���ĵ��_λ�ã����S���B���r�g�����ƣ�늘O�λ��������������B����ˣ�ͨ�^����늈��ıO�y����ֱ�^�صõ�������Mǰ�����|�ĸ�ˮ��r���B���ٶȡ��B��͠�B�ȄӑB׃����r��ˮ�ĝB������˵�늈��������ʿ�ͨ�^�O�y��늈��������Ķ��_����������M�^����픡��װ�ˮ�����A�����D��������M�^���в�ͬ�r�g�ε�����늷���ǰ̽�y���O�y����ҕ���������ʾ��D��
������M�^���в�ͬ�r�g�ε�����늷���ǰ̽�y���O�y��ҕ���������ʾ��D
1.��Ȼ�λ׃������ 2.���׃������
��Ȼ�λ�����׃������
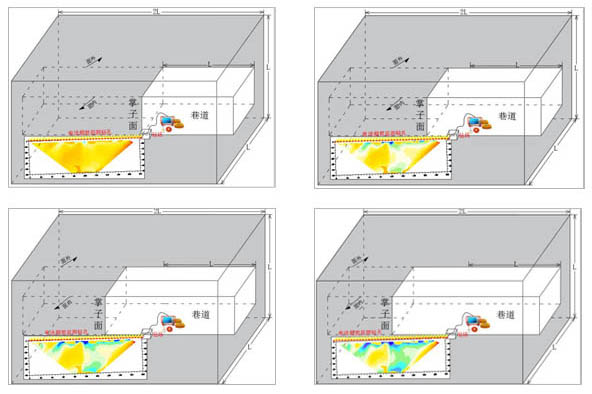
��D��ʾ���v���˴���̽�y�^����x���픰�Ĵ�ֱ�߶ȣ���λ���ף��M���˴����^�y�r�g���{ɫ���{�����������ֵ���tɫ���{�����������ֵ���������ó��Ŀs�ű�0.32��̽�y���x�sС��õ��挍�ij�ǰ̽�yҕ����ʈD���ڈD���܉����@���^�y��11��14�ճ��F�ď����³��F����64m~66m̎��ҕ�����ֵ�����@���������Ɯyԓ�߶ȳ��F����x�ӣ����·��r�ӏ����³����¡�ͬ����11��14���^�y��52m~58m�����ȣ�ҕ�����ֵ�_ʼ���ߣ��Ɣ��錧ˮ��϶���_ʼ�l������ˮ��϶���l����߸߶Ȟ�58m~59m��
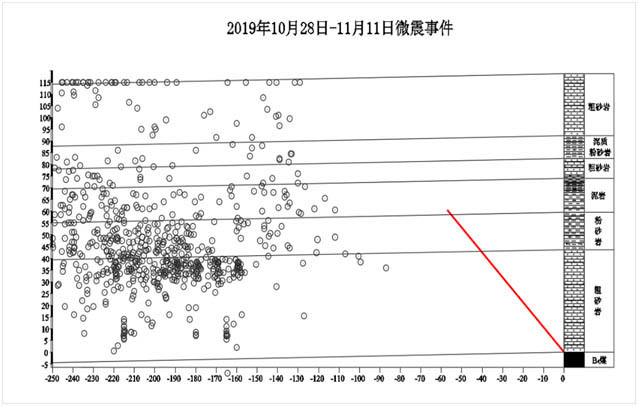
ͨ�^���O�y���g����̎�������Дࣺ�ڹ�����ز��^����픰��ɰ�r�϶��c��ɰ�r����̎�l��������϶����϶������35m~45m���������¼��ֲ���r�Լ��������Д���ˮ��϶���߶ȼs��55m��
��λ�Y���D




�ھ��ͷ�